golang调度模型
模型总揽
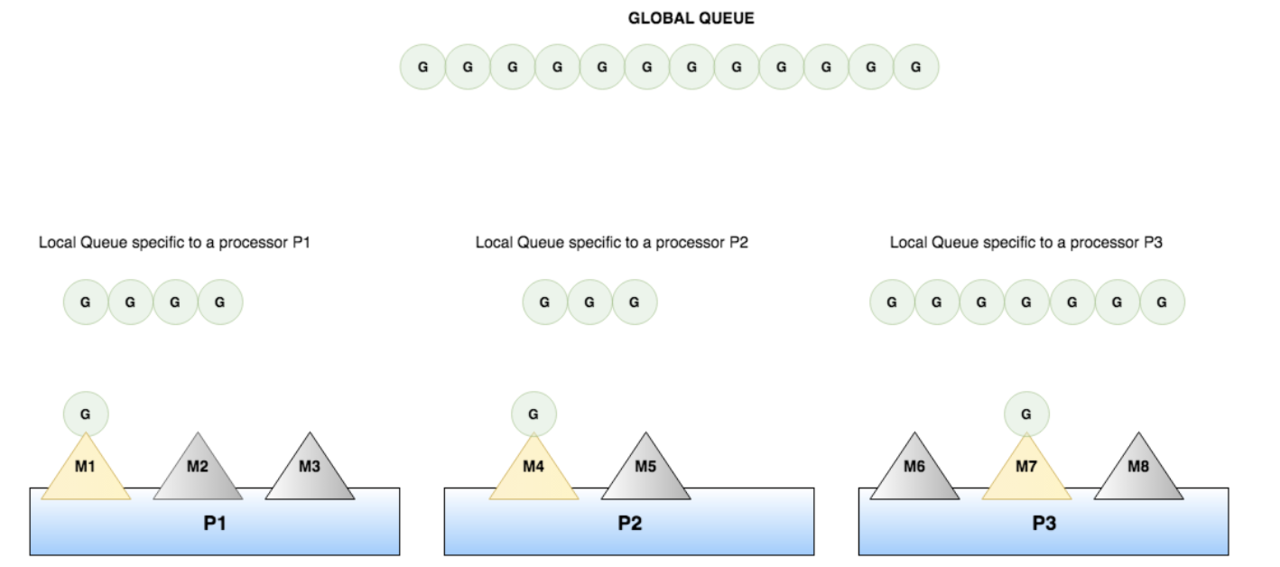
核心实体
Goroutines (G)
golang调度单元,golang可以开启成千上万个g,每个g可以理解为一个任务,等待被调度。其存储了goroutine的执行stack信息、goroutine状态以及goroutine的任务函数等。g只能感知到p,下文说的m对其透明的。
OSThread (M)
系统线程,实际执行g的狠角色,但m并不维护g的状态,一切都是由幕后黑手p来控制。
Processor (P)
维护m执行时所需要的上下文,p的个数通常和cpu核数一致(可以设置),代表gorotine的并发度。其维护了g的队列。
实体间的关系
一图胜千言,直接看这个经典的图
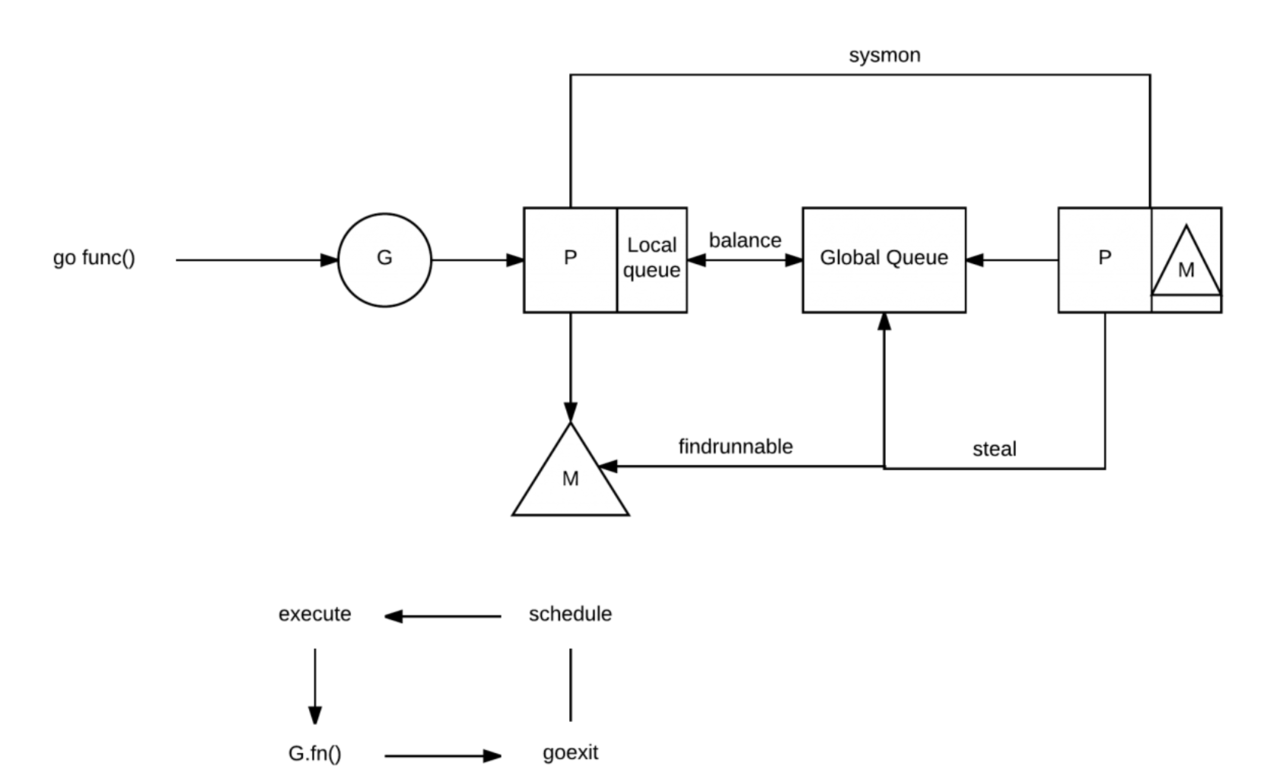
调度本质
即schedule函数,通过调度,放弃目前执行的g,选择一个g来执行。选择算法不是本文重点,这里不做过多讲述。
切换时机
- 会阻塞的系统调用,比如文件io,网络io;
- time系列定时操作;
- go func的时候, func执行完的时候;
- 管道读写阻塞的情况;
- 垃圾回收之后。
- 主动调用runtime.Gosched()
调度时机分析
阻塞性系统调用
系统调用,如read,golang重写了所有系统调用,在系统调用加入了调度逻辑 拿read举例
/usr/local/go/src/os/file.go:97
// Read reads up to len(b) bytes from the File.
// It returns the number of bytes read and an error, if any.
// EOF is signaled by a zero count with err set to io.EOF.
func (f *File) Read(b []byte) (n int, err error) {
if f == nil {
return 0, ErrInvalid
}
n, e := f.read(b)
if n == 0 && len(b) > 0 && e == nil {
return 0, io.EOF
}
if e != nil {
err = &PathError{"read", f.name, e}
}
return n, err
}
嵌套到几层,就不全部贴出来,跟到底是如下函数:
func read(fd int, p []byte) (n int, err error) {
var _p0 unsafe.Pointer
if len(p) > 0 {
_p0 = unsafe.Pointer(&p[0])
} else {
_p0 = unsafe.Pointer(&_zero)
}
r0, _, e1 := Syscall(SYS_READ, uintptr(fd), uintptr(_p0), uintptr(len(p)))
n = int(r0)
if e1 != 0 {
err = errnoErr(e1)
}
return
}
func Syscall(trap, a1, a2, a3 uintptr) (r1, r2 uintptr, err Errno)
Syscall是汇编实现
TEXT ·Syscall(SB),NOSPLIT,$0-56
BL runtime·entersyscall(SB)
MOVD a1+8(FP), R3
MOVD a2+16(FP), R4
MOVD a3+24(FP), R5
MOVD R0, R6
MOVD R0, R7
MOVD R0, R8
MOVD trap+0(FP), R9 // syscall entry
SYSCALL R9
BVC ok
MOVD $-1, R4
MOVD R4, r1+32(FP) // r1
MOVD R0, r2+40(FP) // r2
MOVD R3, err+48(FP) // errno
BL runtime·exitsyscall(SB)
RET
ok:
MOVD R3, r1+32(FP) // r1
MOVD R4, r2+40(FP) // r2
MOVD R0, err+48(FP) // errno
BL runtime·exitsyscall(SB)
RET
可以看到,进入系统调用时,是调用entersyscall,当离开系统调用,会运行exitsyscall
// Standard syscall entry used by the go syscall library and normal cgo calls.
//go:nosplit
func entersyscall(dummy int32) {
reentersyscall(getcallerpc(unsafe.Pointer(&dummy)), getcallersp(unsafe.Pointer(&dummy)))
}
func reentersyscall(pc, sp uintptr) {
_g_ := getg()
// Disable preemption because during this function g is in Gsyscall status,
// but can have inconsistent g->sched, do not let GC observe it.
_g_.m.locks++
// Entersyscall must not call any function that might split/grow the stack.
// (See details in comment above.)
// Catch calls that might, by replacing the stack guard with something that
// will trip any stack check and leaving a flag to tell newstack to die.
_g_.stackguard0 = stackPreempt
_g_.throwsplit = true
// Leave SP around for GC and traceback.
save(pc, sp)
_g_.syscallsp = sp
_g_.syscallpc = pc
casgstatus(_g_, _Grunning, _Gsyscall)
if _g_.syscallsp < _g_.stack.lo || _g_.stack.hi < _g_.syscallsp {
systemstack(func() {
print("entersyscall inconsistent ", hex(_g_.syscallsp), " [", hex(_g_.stack.lo), ",", hex(_g_.stack.hi), "]\n")
throw("entersyscall")
})
}
if trace.enabled {
systemstack(traceGoSysCall)
// systemstack itself clobbers g.sched.{pc,sp} and we might
// need them later when the G is genuinely blocked in a
// syscall
save(pc, sp)
}
if atomic.Load(&sched.sysmonwait) != 0 { // TODO: fast atomic
systemstack(entersyscall_sysmon)
save(pc, sp)
}
if _g_.m.p.ptr().runSafePointFn != 0 {
// runSafePointFn may stack split if run on this stack
systemstack(runSafePointFn)
save(pc, sp)
}
_g_.m.syscalltick = _g_.m.p.ptr().syscalltick
_g_.sysblocktraced = true
_g_.m.mcache = nil
_g_.m.p.ptr().m = 0
atomic.Store(&_g_.m.p.ptr().status, _Psyscall)
if sched.gcwaiting != 0 {
systemstack(entersyscall_gcwait)
save(pc, sp)
}
// Goroutines must not split stacks in Gsyscall status (it would corrupt g->sched).
// We set _StackGuard to StackPreempt so that first split stack check calls morestack.
// Morestack detects this case and throws.
_g_.stackguard0 = stackPreempt
_g_.m.locks--
}
进入系统调用时,p和m分离,当前运行的g状态变为_Gsyscall。
_Gsyscall恢复时机:
1、 当m执行完,调用exitsyscall重新和之前的p绑定,其中调度的还是schedule函数;
2、 sysmon线程,发现该p一定时间没有执行,会其分配一个新的m。此时进入调度。
time定时类操作
都拿time.Sleep举例
// Sleep pauses the current goroutine for at least the duration d.
// A negative or zero duration causes Sleep to return immediately.
func Sleep(d Duration)
实际定义在runtime
// timeSleep puts the current goroutine to sleep for at least ns nanoseconds.
//go:linkname timeSleep time.Sleep
func timeSleep(ns int64) {
if ns <= 0 {
return
}
t := getg().timer
if t == nil {
t = new(timer)
getg().timer = t
}
*t = timer{}
t.when = nanotime() + ns
t.f = goroutineReady
t.arg = getg()
lock(&timers.lock)
addtimerLocked(t)
goparkunlock(&timers.lock, "sleep", traceEvGoSleep, 2)
}
goparkunlock 最终调用gopark
func gopark(unlockf func(*g, unsafe.Pointer) bool, lock unsafe.Pointer, reason string, traceEv byte, traceskip int) {
mp := acquirem()
gp := mp.curg
status := readgstatus(gp)
if status != _Grunning && status != _Gscanrunning {
throw("gopark: bad g status")
}
mp.waitlock = lock
mp.waitunlockf = *(*unsafe.Pointer)(unsafe.Pointer(&unlockf))
gp.waitreason = reason
mp.waittraceev = traceEv
mp.waittraceskip = traceskip
releasem(mp)
// can't do anything that might move the G between Ms here.
mcall(park_m)
}
mcall(fn) 是切换到g0,让g0来调用fn,这里我们看下park_m定义 park_m
func park_m(gp *g) {mcall(park_m)
_g_ := getg()
if trace.enabled {
traceGoPark(_g_.m.waittraceev, _g_.m.waittraceskip)
}
casgstatus(gp, _Grunning, _Gwaiting)
dropg()
if _g_.m.waitunlockf != nil {
fn := *(*func(*g, unsafe.Pointer) bool)(unsafe.Pointer(&_g_.m.waitunlockf))
ok := fn(gp, _g_.m.waitlock)
_g_.m.waitunlockf = nil
_g_.m.waitlock = nil
if !ok {
if trace.enabled {
traceGoUnpark(gp, 2)
}
casgstatus(gp, _Gwaiting, _Grunnable)
execute(gp, true) // Schedule it back, never returns.
}
}
schedule()
}
可以看到,先把状态转化为_Gwaiting, 再进行了一次schedule 针对_Gwaiting的g,需要调用goready,才能恢复。
新起一个协程和退出
新开一个协程,g状态会变为_GIdle,触发调度。当协程执行完,会调用goexit1 此时状态变为_GDead _Gdead可以被复用,或者被gc清除。
管道阻塞
chansend即c<-chanel的实现
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
if c == nil {
if !block {
return false
}
gopark(nil, nil, "chan send (nil chan)", traceEvGoStop, 2)
throw("unreachable")
}
if debugChan {
print("chansend: chan=", c, "\n")
}
if raceenabled {
racereadpc(unsafe.Pointer(c), callerpc, funcPC(chansend))
}
........
// 省略无关代码
........
// Block on the channel. Some receiver will complete our operation for us.
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
// No stack splits between assigning elem and enqueuing mysg
// on gp.waiting where copystack can find it.
mysg.elem = ep
mysg.waitlink = nil
mysg.g = gp
mysg.selectdone = nil
mysg.c = c
gp.waiting = mysg
gp.param = nil
c.sendq.enqueue(mysg)
goparkunlock(&c.lock, "chan send", traceEvGoBlockSend, 3)
// someone woke us up.
if mysg != gp.waiting {
throw("G waiting list is corrupted")
}
gp.waiting = nil
if gp.param == nil {
if c.closed == 0 {
throw("chansend: spurious wakeup")
}
panic(plainError("send on closed channel"))
}
gp.param = nil
if mysg.releasetime > 0 {
blockevent(mysg.releasetime-t0, 2)
}
mysg.c = nil
releaseSudog(mysg)
return true
}
可以看到,实际还是调用goparkunlock->gopark,来进行调度。
gc之后
stw之后,会重新选择g开始执行。此处不对垃圾回收做过多扩展。
主动调用runtime.Gosched()
没有找到非要调用runtime.Gosched的场景,主要作用还是为了调试,学习runtime吧
// Gosched yields the processor, allowing other goroutines to run. It does not
// suspend the current goroutine, so execution resumes automatically.
//go:nosplit
func Gosched() {
mcall(gosched_m)
}
第一步就将环境切换到g0,然后执行一个叫gosched_m的函数
// Gosched continuation on g0.
func gosched_m(gp *g) {
if trace.enabled {
traceGoSched()
}
goschedImpl(gp)
}
func goschedImpl(gp *g) {
status := readgstatus(gp)
if status&^_Gscan != _Grunning {
dumpgstatus(gp)
throw("bad g status")
}
casgstatus(gp, _Grunning, _Grunnable)
dropg()
lock(&sched.lock)
globrunqput(gp)
unlock(&sched.lock)
schedule()
}
可以看到,当前g被设置为_Grunnable,放入执行队列。然后调用schedule,选择一个合适的g进行执行。
总结
golang协程调度时机主要是阻塞性操作开始,结束。研究每个场景相关代码,即可对golang有更深的理解。这里也分享一个阅读源码的小经验,每次带着一个特定问题去寻找答案,比如本文的调度时机,后面再看调度算法,垃圾回收,这样每次能忽略无关因素,通过多个不同的主题,整个框架会越来越完善。