目录
- 树
- 树的性质
- 树的存储结构
- 双亲表示法
- 孩子表示法
- 孩子兄弟表示法(二叉树表示法)
- 树和森林的遍历
- 树的遍历
- 森林的遍历
- 二叉树
- 二叉树的性质
- 二叉树的存储结构
- 二叉树的遍历
- 先序遍历(PreOrder)
- 中序遍历(InOrder)
- 后序遍历(InOrder)
- 层次遍历(LevelOrder)
- 线索二叉树
- 前序线索化
- 中序线索化
- 线索二叉树的遍历
- 堆
- 树和二叉树的应用
- 二叉排序树(BST)
- 查找
- 插入
- 构造
- 删除
- 平衡二叉树(AVL)
- 插入
- 查找
- 哈夫曼树(最优二叉树)
- 二叉排序树(BST)
- 常用算法
- 层次遍历的应用
- 后序遍历的应用
(ElemType*)malloc(sizeof(ElemType)*InitSize);
此函数是一个指针型函数,返回的指针指向该分配域的开头位置。
树
树的性质
- 树中的结点数 = 所有结点的度数 + 1
- 度为m的树中第i层上至多有\(m^{i-1}\)个结点(i>=1)
- 高度为h的m叉树至多有\((m^h-1)/(m-1)\)个结点(推导公式S=\(m^{h-1}+m^{h-2}+m^{h-3}+…+m+1\)=\((m^h-1)/(m-1)\))
- 具有n个结点的m叉树的最小高度为\(⌈log_m(n(m-1)+1)⌉\)
- 按结点数的和算:总结点数\(N=n_0+n_1+n_2+…+n_m\)(结点数的和)(树的度为m,即 m叉树)
- 按度数算:总结点数\(N=n_1+2n_2+3n_3+…+mn_m+1\)(度数+1)
- 由上面两个式子可得,\(n_0=1+n_2+2n_3+3n_4+…+(m-1)n_m\)
树的存储结构
双亲表示法
双亲表示法采用一组连续空间来存储每个结点,同时在每个结点中增设一个伪指针,指示其双亲结点在数组中的位置。根结点下标为0,其伪指针域为-1.
- 存储结构;
//双亲表示法
#define MAX_TREE_SIZE 100 //树中最多结点数
typedef struct { //树的结点定义
ElemType data; //数据元素
int parent; //双亲位置域
}PTNode;
typedef struct { //树的类型定义
PTNode nodes[MAX_TREE_SIZE]; //双亲表示
int n; //结点数
}PTree; //Parent Tree
- 优点:
可以很快得到每个结点的双亲结点 - 缺点:
但求结点的孩子时需要遍历整个结构
孩子表示法
孩子表示法是从树的根节点开始,使用顺序表依次存储树中各个节点,将每个结点的孩子结点都用单链表链接起来形成一个线性结构,用于存储各节点的孩子节点位于顺序表中的位置,此时n个结点就有n个孩子链表(叶子结点的孩子链表为空表)。
- 存储结构;
//孩子表示法
typedef struct CTNode{
int child;//链表中每个结点存储的不是数据本身,而是数据在数组中存储的位置下标
struct CTNode * next;
}ChildPtr;
typedef struct {
TElemType data;//结点的数据类型
ChildPtr* firstchild;//孩子链表的头指针
}CTBox;
typedef struct{
CTBox nodes[MAX_SIZE];//存储结点的数组
int n,r;//结点数量和树根的位置
}CTree; //Child Tree
- 优点:
寻找子女的操作非常直接 - 缺点:
而寻找双亲的操作需要遍历n个结点中孩子链表指针域所指向的n个孩子链表
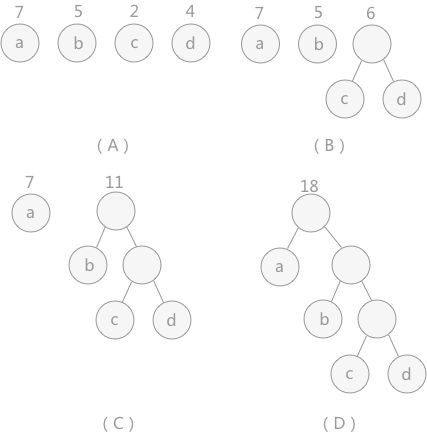
孩子兄弟表示法(二叉树表示法)
孩子兄弟表示法(左孩子右兄弟)以二叉链表作为树的存储结构。使每个结点包括三部分内容:结点值、指向结点第一个孩子结点的指针,及指向结点下一个兄弟结点的指针(沿此域可以找到结点的所有兄弟结点)。
- 存储结构:
//孩子兄弟表示法
typedef struct CSNode {
ElemType data; //数据域
struct CSNode *firstchild, *nextsibling; //第一个孩子和右兄弟指针
}CSNode, *CSTree; //Child Sibling Tree
- 优点:
可以方便地实现树转换为二叉树的操作,易于查找结点的孩子结点等 - 缺点:
从当前结点寻找其双亲结点比较麻烦。若为每个结点增设一个parent域指向其父节点,则查找结点的父节点也很方便。
树和森林的遍历
与二叉树遍历的对应关系
| 树 | 森林 | 二叉树 |
|---|---|---|
| 先根遍历 | 先序遍历 | 先序遍历 |
| 后根遍历 | 中序遍历 | 中序遍历 |
树的遍历
- 先根遍历:
若树非空,则先访问根节点,再按从左到右的顺序遍历根结点的每棵子树,其访问顺序与这棵树相应的二叉树的先序遍历循序相同。
先序遍历(NLR)->先根遍历(根 孩子 兄弟) - 后根遍历:
若树非空,则按从左到右的顺序遍历根结点的每棵子树,之后再访问根节点。其访问顺序与这棵树相应的二叉树的中序遍历循序相同。
中序遍历(LNR)->后根遍历(孩子 根 兄弟)
森林的遍历
- 先序遍历森林。若森林为非空,则按如下规则进行遍历:
- 访问森林中第一棵树的根节点。
- 先序遍历第一棵树中根节点的子树森林。
- 先序遍历除去第一棵树之后剩余的树构成的森林。
- 中序遍历森林。若森林为非空,则按如下规则进行遍历:
- 中序遍历第一棵树中根节点的子树森林。
- 访问森林中第一棵树的根节点。
- 中序遍历除去第一棵树之后剩余的树构成的森林。
二叉树
二叉树的性质
- 非空二叉树上的叶子结点数 = 度为2的结点数 + 1,即 \(n_0 = n_2 + 1\)(叶子当然比分支多啊,类比一下现实中的树)
- 非空二叉树上第k层上至多有\(2^{k-1}\)个结点(k$>=$1)
- 高度为h的二叉树至多有\(2^h-1\)个结点(h>=1)
- 对完全二叉树按从上到下、从左到右的顺序依次编号1,2,…,n,则对结点i有以下关系:
- 所在层次为\(⌊log_2i⌋ + 1\)
- 双亲结点编号为⌊\(i/2\)⌋
- 左孩子结点编号为2i
- 右孩子结点编号为2i+1
PS:若越界则不存在。
这个性质也是二叉树(堆)的顺序存储下标从1开始的理由。
- 具有n个(n>0)结点的完全二叉树的高度为\(⌈log_2(n+1)⌉\)或\(⌊log_2n + 1⌋\)
- 在有n个结点的二叉树中,有n+1个空指针
- 在有n个结点的二叉树中,有n-1个度(即 边,一个度为一个边)(除了根结点,其他结点都是边+结点)
- 完全二叉树\(n_1\)只能等于0或1
- 哈夫曼树由于其构造方法,所以只有度为0和度为2的结点(\(n_1\)=0)
- \(N=n_0+n_1+n_2=n_1+2n_2+1\)
二叉树的存储结构
- 顺序存储结构:
- 注意:要从数组下标为1开始存储树中的结点(若从0开始存,则不满足上述完全二叉树的结点关系性质)
- 适用于完全二叉树(堆)和满二叉树
注意区别树的顺序存储结构与二叉树的顺序存储结构,在树的顺序存储结构(双亲表示法)中,数组下标代表结点的编号,下标上所存的内容指示了结点之间的关系;而在二叉树的顺序存储结构中,数组下标既代表了结点的编号,又指示了树中各结点之间的关系。
- 链式存储结构:
- 数据域 + 左右指针域
二叉树的遍历
注意:中序和后序遍历,都是出容器时 遍历访问,进入容器只是存放遍历结点的顺序。
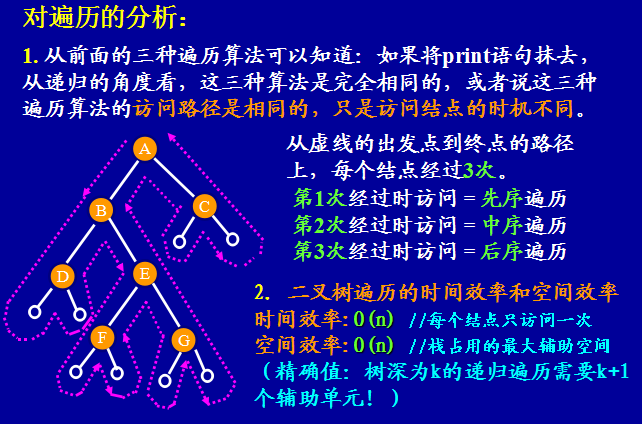
先序遍历是访问后,入容器遍历二叉树其实是以一定的规则,将二维的二叉树中的结点排列成一个线性序列,其实质是对一个非线性结构进行线性化操作,使这个访问序列中的每个结点(第一个和最后一个除外)都有一个直接前驱和直接后继。
注意:这三种遍历算法的访问路径是相同的(都是围着树的外圈访问一整圈),只是访问结点的时机不同。(先序遍历第一次经过就访问,中序遍历第二次经过才访问,后序遍历第三次经过才访问。加上左右分支,沿着树的外圈访问),可以以此来求某一结点的前驱后继。但要求整体的前驱后继,还是将整个二叉树生成遍历序列。

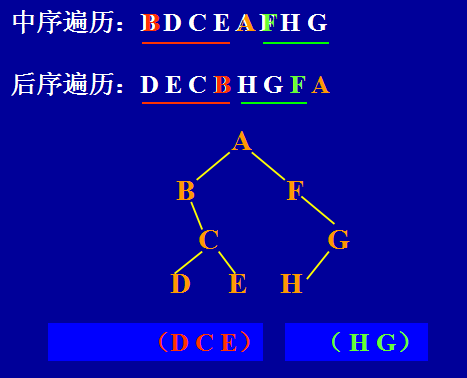
- 由二叉树的先序序列和中序序列(或 后序序列和中序序列)可以唯一地确定一棵二叉树。
由先(后)序序列可以得知根结点,再由中序序列可以根据根结点划分左右子树;
再由先(后)序序列得知左右子树根结点,再中序划分。。
我们以下的使用的栈或队列都是作为一个工具来解决其他问题的,我们可以把栈或队列的声明和操作写的很简单,而不必分函数写出。
- 顺序栈
- 声明一个栈并初始化:
ElemType stack[maxSize]; //存放栈中的元素
int top = -1; //栈顶指针(指向栈顶元素)
1. 元素进栈:
stack[++top] = x;
1. 元素出栈:
x = stack[top--];
1. 判断栈空
top == -1; //栈空
top > -1; //栈非空
- 顺序队列
- 声明一个队列并初始化:
ElemType queue[maxSize]; //存放队列中元素
int front = -1, rear = -1; //队头(指向队头元素的前一个位置),队尾(指向队尾元素)
1. 元素入队:
queue[++rear] = x;
1. 元素出队:
x = queue[++front];
1. 判断队空
front == rear; //队空
front < rear; //队非空
先序遍历(PreOrder)
左右都是经过,根才访问。
- 操作过程:
简称,根左右
若二叉树为空,则什么也不做;否则,- 访问根节点;
- 先序遍历左子树;
- 先序遍历右子树。
- 具体实现:
- 递归算法:
void PreOrder(BiTree T) {
if(T == NULL) { //合法性检验
return;
}
visit(T); //访问根节点
PreOrder(T->lchild); //递归遍历左子树
PreOrder(T->rchild); //递归遍历右子树
}
* 非递归算法:
//二叉树先序遍历的非递归算法,算法需要借助一个栈
void PreOrder2(BiTree T) {
InitStack(S); //初始化栈
BiTNode *p = T; //p是遍历指针
while(p || !IsEmpty(S)) { //p不空 或 栈中还有元素时循环
if(p) { //根节点进栈,遍历左子树
visit(p);
Push(S, p); //每遇到非空二叉树先向左走
p = p->lchild;
}else { //根指针出栈,访问根节点,遍历右子树
Pop(S, p); //出栈,访问根节点
p = p->rchild; //再向右子树走
}
}
}
中序遍历(InOrder)
左右都是经过,根才访问。
- 操作过程:
简称,左根右 - 具体实现:
- 递归算法:
void InOrder(BiTree T) {
if(T == NULL) {
return;
}
InOrder(T->lchild);
visit(T);
InOrder(T->rchild);
}
* 非递归算法:
借助**栈**,可以将二叉树的递归遍历算法转换为非递归算法。
先扫描(并非访问)根节点的所有左节点,并将它们一一进栈,然后出栈一个结点\*p(显然结点\*p没有左孩子结点或左孩子结点均已被访问过),访问它。然后扫描该结点的右孩子结点,将其进栈,再扫描该右孩子结点的所有左结点并一一进栈,如此继续,直到栈空为止。
//二叉树中序遍历的非递归算法,算法需要借助一个栈
void InOrder2(BiTree T) {
InitStack(S); //初始化栈
BiTNode *p = T; //p是遍历指针
while(p || !IsEmpty(S)) { //p不空 或 栈中还有元素时循环
if(p) { //根节点进栈,遍历左子树
Push(S, p); //每遇到非空二叉树先向左走
p = p->lchild;
}else { //根指针出栈,访问根节点,遍历右子树
Pop(S, p); //出栈,访问根节点
visit(p);
p = p->rchild; //再向右子树走
}
}
}
后序遍历(InOrder)
左右都是经过,根才访问。
- 操作过程:
简称,左右根 - 具体实现:
- 递归算法:
void PostOrder(BiTree T) {
if(T == NULL) {
return;
}
PostOrder(T->lchild);
PostOrder(T->rchild);
visit(T);
}
* 非递归算法:
后序非递归遍历二叉树的顺序是是先访问左子树,再访问右子树,最后访问根结点。当用**堆栈**来存储结点时,必须分清返回根结点时是从左子树返回的还是从右子树返回的。所以,使用**辅助指针r**,其指向最近访问过的结点。也可在结点中增加一个标志域,记录是否已被访问。
void PostOrder(BiTree T) {
InitStack(S);
p = T;
r = NULL; //r指向最近访问过的结点
while(p || !IsEmpty(S)) {
if(p) { //走到最左边
push(S, p);
p = p->lchild;
}else { //向右
GetTop(S, p); //取栈顶结点
if(p->rchild && p->rchild!=r) { //若右子树存在,且未被访问过
p = p->rchild; //转向右
}else { //否则,弹出结点并访问
pop(S, p); //将结点弹出
visit(p->data); //访问该结点
r = p; //记录最近访问过的结点
p = NULL; //结点访问完后,重置p指针,用于再次循环(从栈内结点开始)
}
}
}
}
因为直到最后才访问根结点,所以访问到值为x的结点时,上面的所有祖先根结点都还没被访问,栈中所有元素均为该结点的祖先,依次出栈打印即可。
迭代后序遍历访问一个结点*p时,栈中结点恰好是*p结点的所有祖先。从栈底到栈顶结点再加上*p结点,刚好构成从根结点到*p结点的一条路径。再很多算法设计中都利用了这一特性求解,如求根结点到某结点的路径、求两个结点的最近公共祖先等,都可以利用这个思路来实现。
这三种遍历算法中,递归遍历左右子树的顺序都是固定的,只是访问根结点的顺序不同。不管采用哪种遍历算法,每个结点都访问一次且仅访问一次,故时间复杂度都是O(n)。
在递归遍历中,递归工作栈的栈深恰好为树的深度,所以在最坏情况下,二叉树是有n个结点且深度为n的单支树,遍历算法的空间复杂度为O(n)。
层次遍历(LevelOrder)
- 操作过程:
要进行层次遍历,需要借助一个队列。先将二叉树根结点入队,然后出队,访问该结点,若它有左子树,则将左子树根结点入队;若它有右子树,则将右子树根结点入队。然后出队,对出队结点访问,如此反复,直到队列为空。 - 具体实现:
void LevelOrder(BiTree T) {
InitQueue(Q); //初始化辅助队列
BiTNode *p;
EnQueue(Q, T); //将根结点入队
while(!IsEmpty(Q)) { //队列不空循环
DeQueue(Q, p); //队头元素出队,出队指针才是用来遍历的遍历指针
visit(p); //访问当前p所指向结点
if(p->lchild != NULL) { //左子树不空,则左子树入队列
EnQueue(Q, p->lchild);
}
if(p->rchild != NULL) { //右子树不空,则右子树入队列
EnQueue(Q, p->rchild);
}
}
}
用层次遍历易于找到某结点的父结点。而且层次遍历采用迭代效率高,迭代方法也方便实现。
线索二叉树
传统的链式存储仅能体现一种父子关系,不能直接得到结点在遍历中的前驱或后继。在二叉链表表示的二叉树中存在大量的空指针(n-1个),利用这些空链域存放指向其直接前驱或后继的指针,即可成为线索二叉树。
在有n个结点的二叉树中,有n+1个空指针。这是因为每个叶结点有2个空指针,而每个度为1的结点有1个空指针,所以总的空指针数为\(2n_0+n_1\),又有\(n_0=n_2+1\),所以总的空指针为\(n_0+n_1+n_2+1=n+1\)
注意:线索二叉树指明了在存储过程中的数据存放方式,所以它是一种物理结构。
- 目的:
为了加快查找结点前驱和后继的速度(加快对二叉树的遍历)。
线索二元树的左线索指向其前驱,右线索指向其后继。 - 存储结构:
//线索二叉树
typedef struct ThreadNode { //线索二叉树结点
ElemType data; //数据元素
struct ThreadNode *lchild, *rchild; //左、右孩子指针
int ltag, rtag; //左、右线索标志
//tag=0代表child指针指向孩子,tag=1代表child指针指向前驱后继
}ThreadNode, *ThreadTree;
以这种结点结构构成的二叉链表作为二叉树的存储结构,称为线索链表;
其中指向结点前驱和后继的指针称为线索;
加上线索的二叉树称为线索二叉树;
对二叉树以某种遍历使其变为线索二叉树的过程称为线索化。
前序线索化
- 具体实现:
通过前序遍历对二叉树线索化的递归算法如下:
//前序遍历对二叉树线索化的递归算法
void PreThread(ThreadTree &p, ThreadTree &pre) {
//指针pre指向前序遍历时上一个刚刚访问过的结点,用它来表示各结点访问的前后关系
if(!p) { //递归出口
return;
}
//下面开始建立线索化(其实就相当于遍历中的 “访问” )
if(p->lchild == NULL) { //左子树遍历到头,左子树为空,“建立前驱线索”
p->lchild = pre;
p->ltag = 1;
}
if(pre!=NULL && pre->rchild==NULL) { //“建立前驱结点的后继线索”
pre->rchild = p; //“建立前驱结点的后继线索”(仅建立了前驱的后继线索,所以最后一个结点的后继线索没有建立)
pre->rtag = 1;
}
pre = p; //标记当前结点称为刚刚访问过的结点(注意:访问!=扫描)
//访问是指对该结点进行操作(如print输出),而扫描则代表只是经过了这个结点,并没有执行任何操作
PreThread(p->lchild, pre); //递归线索化左子树
PreThread(p->rchild, pre); //递归,线索化右子树
}
//通过前序遍历建立前序线索二叉树
void CreatePreThread(ThreadTree T) {
ThreadTree pre = NULL;
if(!T) {
return;
}
PreThread(T, pre); //线索化二叉树,没有建立最后一个结点的后继线索
pre->rchild = NULL; //处理遍历的最后一个结点
pre->rtag = 1;
}
中序线索化
- 操作过程:
对二叉树的线索化,实质上就是遍历一次二叉树,只是在遍历的过程中,检查当前结点左右指针域是否为空,若为空,将它们改为指向前驱结点或后继结点的线索。 - 具体实现:
通过中序遍历对二叉树线索化的递归算法如下:
//中序遍历对二叉树线索化的递归算法
void InThread(ThreadTree &p, ThreadTree &pre) {
//指针pre指向中序遍历时上一个刚刚访问过的结点,用它来表示各结点访问的前后关系
if(!p) { //递归出口
return;
}
InThread(p->lchild, pre); //递归线索化左子树
//下面开始建立线索化(其实就相当于遍历中的 “访问” )
if(p->lchild == NULL) { //左子树遍历到头,左子树为空,建立前驱线索
p->lchild = pre;
p->ltag = 1;
}
if(pre!=NULL && pre->rchild==NULL) {
pre->rchild = p; //建立前驱结点的后继线索(仅建立了前驱的后继线索,所以最后一个结点的后继线索没有建立)
pre->rtag = 1;
}
pre = p; //标记当前结点称为刚刚访问过的结点(注意:访问!=扫描)
//访问是指对该结点进行操作(如print输出),而扫描则代表只是经过了这个结点,并没有执行任何操作
InThread(p->rchild, pre); //递归,线索化右子树
}
//通过中序遍历建立中序线索二叉树
void CreateInThread(ThreadTree T) {
ThreadTree pre = NULL;
if(!T) {
return;
}
InThread(T, pre); //线索化二叉树,没有建立最后一个结点的后继线索
pre->rchild = NULL; //处理遍历的最后一个结点
pre->rtag = 1;
}
线索化后,先序线索二叉树可以很简单的找到一个结点的先序后继,而查找先序前驱必须知道该结点的双亲结点;
中序线索二叉树可以找到一个结点的中序前驱与中序后继;
后序线索二叉树可以找到一个结点的后序前驱,而查找后序后继也必须知道该结点的双亲结点。
线索二叉树的遍历
中序线索化二叉树主要是为访问运算服务的,这种遍历不再需要借助栈,因为他的结点中隐含了线索二叉树的前驱和后继信息。利用线索二叉树,可以实现二叉树遍历的非递归算法。
1、 求中序线索二叉树中中序下的第一个结点:
ThreadNode *Firstnode(ThreadNode *p) {
while(p->ltag == 0) { //最左下的结点(不一定是叶结点)
p = p->lchild;
return p;
}
}
1、 求中序线索二叉树中结点p在中序序列下的后继结点:
ThreadNode *Nextnode(ThreadNode *p) {
if(p->rtag == 0) { //有右子树
return Firstnode(p->rchild); //找右子树的最左下结点(即为后继节点)(手动找)
}else { //rtag==1 直接返回后继线索
return p->rchild; //(根据线索自动找)
}
}
1、 中序线索二叉树的中序遍历算法:
void Inorder(ThreadNode *T) {
//从中序下第一个结点(最左下结点)开始,依次找其后继节点
for(ThreadNode *p=Firstnode(T); p!=NULL; p=Nextnode(p)) {
visit(p);
}
}
堆
优先队列(Priority Queue):特殊的“队列”,取出元素的顺序是按照元素的优先权(关键字)大小,而不是元素进入队列的先后顺序。
使用数组或链表的话效率不高,所以我们试着采用二叉树来实现优先队列,所以我们引入了“堆”。
- 基本概念:
堆可以看成是一棵完全二叉树,特点是父亲大孩子小,或者父亲小孩子大,前者称为大顶堆,后者称为小顶堆。
注意:从根结点到任意结点路径上的结点序列具有有序性。所以堆的插入和删除都是沿着有序的轨迹进行操作。
堆经常被用来实现优先级队列,优先级队列在操作系统的作业调度和其他领域有着广泛的应用。
树和二叉树的应用
二叉排序树(BST)
二叉排序树作为一种动态集合,其特点是树的结构通常不是一次生成的,而是在查找过程中,当树中不存在关键值等于给定值得结点时再进行插入的。
- 二叉排序树(Binary Sort Tree)的定义:
- 若左子树非空,则左子树上所有关键字值均小于根节点关键字值。
- 若右子树非空,则右子树上所有关键字值均大于根节点关键字值。
- 左、右子树本身也分别是一棵二叉排序树。
注意:二叉排序树的插入必为一个新的叶子结点。
左子树结点值 < 根结点值 < 右子树结点值 (没有相等值)
所以对二叉排列树进行中序遍历,可以得到一个递增的有序序列。当有序表是静态查找表时,宜用顺序表作为其存储结构,而采用二分查找实现其查找操作;若有序表是动态查找表,则应选择二叉排序树作为其逻辑结构。
查找
- 操作过程:
二叉排序树的查找是从根节点开始,沿着某个分支逐层向下进行比较的过程。
若二叉排序树非空,则将给定值与根节点的关键字比较,若相等,则查找成功;若给定值小于根节点的关键字,则在根节点的左子树查找;若给定值大于根节点的关键字,则在根节点的右子树查找。 - 具体实现:
- 递归实现:
BSTNode *BST_Search(BiTree T, ElemType key) {
if(!T) {
return NULL;
}
if(key < T->data) {
return BST_Search(key, T->lchild);
}else if(key > T->data) {
return BST_Search(key, T->rchild);
}else { //相等
return T;
}
}
* 非递归实现:
//查找函数返回指向关键字值为key的结点指针,若不存在,返回NULL
BSTNode *BST_Search(BiTree T, ElemType key, BSTNode *&p){
p = NULL; //p指向被查找结点的双亲,用于插入和删除操作中
while(T!=NULL && key!=T->data) {
p = T;
if(key < T->data) {
T = T->lchild;
}else {
T = T->rchild;
}
}
return T;
}
插入
- 操作过程:
若原二叉排序树为空,则直接插入结点;否则,若关键字k小于根结点关键字,则插入左子树,若关键字k大于根结点关键字,则插入右子树。 - 具体实现:
//在二叉排序树T中插入一个关键字为k的结点
int BST_Insert(BiTree &T, ElemType k) {
if(T == NULL) { //原树为空,新插入的记录为根结点
T = (BiTree)malloc(sizeof(BSTNode));
T->data = k;
T->lchild = NULL;
T->rchild = NULL;
return 1; //插入成功
}else if(k == T->data) { //树中存在相同关键字的结点
return 0;
}else if(k < T->data) { //插入T的左子树
return BST_Insert(T->lchild, k);
}else { //插入T的右子树
return BST_Insert(T->rchild, k);
}
}
构造
- 操作过程:
每读入一个元素,就建立一个新结点,若二叉排序树为空,则将新结点作为二叉排序树的根结点;若二叉排序树为非空,则将新结点的值域根结点的值比较,若小于根结点的值,则插入左子树,否则插入右子树。
其实就是,依次输入数据元素,并将它们插入二叉排序树中适当位置上的过程。 - 具体实现:
//用关键字数组str[]建立一个二叉排序树
void Creat_BST(BiTree &T, ElemType str[], int n) {
T = NULL; //初始时bt为空树
int i = 0;
while(i < n) { //依次将每个元素插入
BST_Insert(T, str[i]);
i++;
}
}
删除
在二叉排序树中删除一个结点时,不能把以该结点为根的子树上的结点都删除,必须先把被删除结点从存储二叉排序树的链表摘下,将因删除结点而断开的二叉链表重新链接起来,同时确保二叉排序树的性质不会丢失。
- 操作过程:
- 若被删除结点z是叶结点,则直接删除,不会破坏二叉排序树的性质。
- 若结点z只有一棵左子树或右子树,则让z的子树称为z父节点的子树,替代z的位置。
- 若结点z有左、右两棵子树,则令z的直接后继(或直接前驱)(即右子树中的最小元素(或左子树中最大元素))替代z,然后从二叉排序树中删去这个直接后继(或直接前驱),这样就转换成了第一或第二种情况。
- 具体实现:
//查找最小元素的递归函数
BiTree FindMin(BiTree T) {
if(!T) { //空的二叉搜索树
return NULL;
}
if(!T->lchild) { //找到最左孩子结点并返回
return T;
}else {
return FindMin(T->lchild); //沿着左子树继续找
}
}
//查找最大元素的迭代函数
BiTree FindMax(BiTree T) {
if(!T) { //空的二叉搜索树
return NULL;
}
while(T->rchild) { //找到最右孩子结点
T = T->rchild;
}
return T;
}
//删除二叉排序树中值为x的结点
BiTree Delete(ElemType x, BiTree T) {
BiTree tmp;
if(!T) {
printf("要删除的元素未找到");
}
if(x < T->data) {
T->lchild = Delete(x, T->lchild); //左子树递归删除
}else if(x > T->data) {
T->rchild = Delete(x, T->rchild); //右子树递归删除
}else {
if(T->lchild && T->rchild) { //被删除结点有左右两个子结点
tmp = FindMin(T->rchild)); //在右子树中找最小元素填充删除结点
T->data = tmp->data;
T->rchild = Delete(T->data, T->rchild);//在删除结点的右子树中删除最小元素
}else { //被删除结点有一个或没有子结点
tmp = T;
if(!T->lchild) { //没有左孩子
T = T->rchild;
}else if(!T->rchild) { //没有右孩子
T = T->lchild;
}
free(tmp);
}
}
return T;
}
平衡二叉树(AVL)
为避免树的高度增长过快,降低二叉排序树的性能,规定在插入和删除二叉树结点是,要保证任意结点的左右子树高度差的绝对值不超过1,将这一的二叉树称为平衡二叉树(Balanced Binary Tree),简称平衡树(AVL)。
平衡因子:结点左子树与右子树的高度差为该结点的平衡因子,则平衡二叉树结点的平衡因子的值只可能是-1、0、1。
插入
- 操作过程:
每当在二叉排序树中插入(或删除)一个结点时,首先检查其插入路径上的结点是否因为此次操作而导致了不平衡。若导致了不平衡,则先找到插入路径上离插入结点最近的平衡因子的绝对值大于1的结点A,再对A为根的子树,再保持二叉排序树的前提下,调整各结点的位置关系,使之重新达到平衡。
每次调整的对象都是最小不平衡子树,即以插入路径上离结点最近的平衡因子的绝对值大于1的结点作为根的子树。
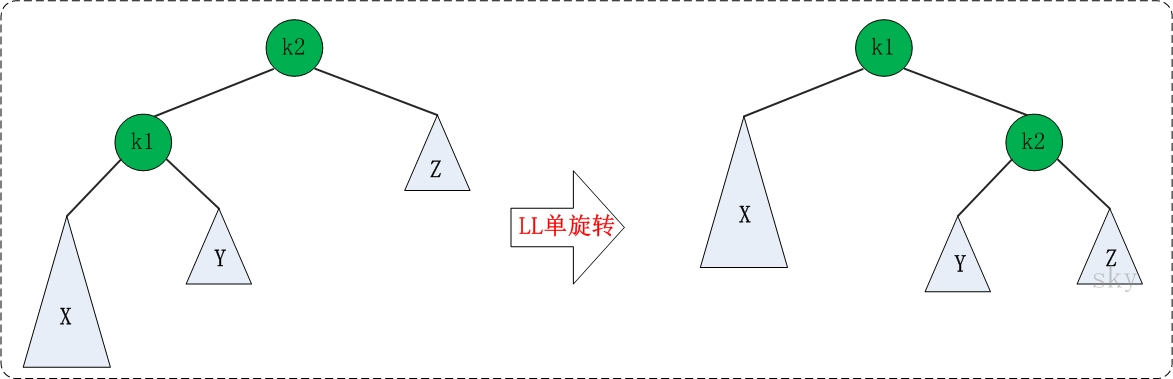
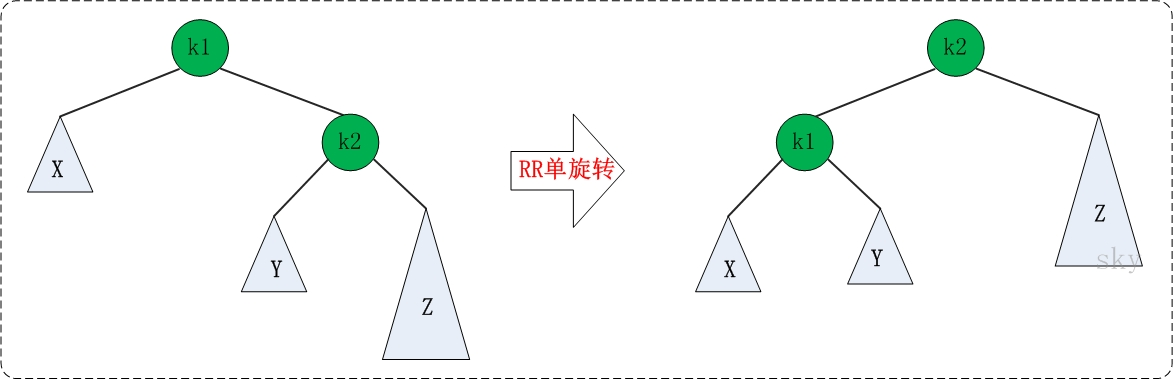
将最小不平衡子树的三个节点按大小列出排序,调整三个结点(爷子孙三代)(LL,RR,LR,RL),调整成父、左孩子、右孩子,调整完毕后,将剩下的结点(小于等于四个,因为调整完毕后只有两层,现在加入第三层)顺着接到下面(若不清楚怎么顺着接,可以将其分支画出来,补充到四个,从左到右接上去就好了(空节点也要接上去))。
- LL:(三个结点:X<k1<k2)(中间大小的结点提出,另外两个放左右)
- RR:(三个结点:k1<k2<Z)
- LR:(三个结点:k1<k2<k3)(中间大小的结点提出,另外两个放左右)(孙子(k2)提出,比较另外两个,放左右)
- RL:(三个结点:k1<k2<k3)


查找
查找过程中,与给定值进行比较的关键字个数不超过树的深度。
- 性质:
假设以\(n_h\)表示深度为h的平衡树中含有的最少结点数。显然,有\(n_0\)=0,\(n_1\)=1,\(n_2\)=2,并且有\(n_h=n_{h-1}+n_{h-2}+1\)。
哈夫曼树(最优二叉树)
在许多实际应用中,树中结点常常被赋予一个表示某种意义的数值,称为该结点的权。
从树的根结点到任意节点的路径长度(经过的边数)与该结点上权值的乘积,称为该结点的带权路径长度。
树中所有结点的带权路径长度之和称为该树的带权路径长度(WPL)。
- WPL=∑路径*结点权值=非叶子结点的权值之和
- 性质:
- 每个初始结点最终都成为叶结点,且权值越小的结点到根结点的路径长度越大。
- 构造过程中共新建了n-1个结点(双分支结点),因此哈夫曼树中的结点总数为2n-1。
- 每次构造都选择2棵树作为新结点的孩子,因此哈夫曼树中不存在度为1的结点。(\(n_1\)=0)
- 字符 <-> 编码 <-> 叶子结点,一一对应。
- 构造:
- 在n个权值中选出两个最小的权值,对应的两个结点组成一个新的二叉树,且新二叉树的根结点的权值为左右孩子权值的和;
- 那两个最小权值的合并为如今这个新的权值;
- 即,在原有的n个权值中删除那两个最小的权值,同时将新的权值加入到n–2个权值的行列中,以此类推;
- 重复(1)和(2),直到所有的结点构建成了一棵二叉树为止,这棵树就是哈夫曼树。
注意:构建时,不要抓着那棵合成的树一直构建,当该树合成到一定程度,它就不是最小的权值了。
哈夫曼编码时,0和1究竟是表示左子树还是表示右子树没有明确规定。因此,左、右结点的顺序是任意的,所以构造出的哈夫曼树并不唯一,但各哈夫曼树的带权路径长度(WPL, Weighted Path Length)相同且为最优。
常用算法
层次遍历的应用
求树高
- 设计思想:
采用层次遍历的算法,设置变量level记录当前结点所在的层数,设置变量last指向当前层的最右结点,每次层次遍历出队时与last比较,若两者相等,则层数+1,并让last指向下一层的最右结点,直到遍历完成。出队指针用来访问遍历(遍历指针),出队遇到最右结点层数+1,其实也可以遇到下层第一个结点+1,但是不好记录第一个结点。
- 算法:
int Btdepth(BiTree T) {
if(!T) {
return 0;
}
int front = -1, rear = -1; //队头队尾,队头指向队头元素的前一个位置,队尾指向队尾元素
int last = 0, level = 0; //last指向下一层的最右结点
BiTree Q[MaxSize]; //设置队列Q,元素是二叉树结点指针且容量足够
Q[++rear] = T; //将根结点入队
BiTree p;
//其实层次遍历,是队头指针遍历(出队时访问),队尾指针只是负责增加元素
while(front < rear) { //队不空
p = Q[++front]; //队列元素出队
if(p->lchild) {
Q[++rear] = p->lchild //左孩子入队
}
if(p->rchild) {
Q[++rear] = p->rchild; //右孩子入队
}
if(front==last) { //处理该层的最右结点,front指向该层刚出队的最右节点,遇到最右结点层数+1
level++; //层数+1
last = rear; //last指向下层
}
}
return level;
}
//递归
int Btdepth2(BiTree T) {
if(!T) {
return 0;
}
ldep = Btdepth2(T->lchild); //左子树高度
rdep = Btdepth2(T->rchild); //右子树高度
if(ldep > rdep) {
return ldep+1; //树的高度为子树最大高度加根结点
}else {
return rdep+1;
}
}
求树宽
- 设计思想:
采用层次遍历的方法求出所有结点的层次,并将所有结点和对应的层次放在一个队列中,然后通过扫描队列求出各层的结点总数,最大的层结点总数即为二叉树的宽度。MY:采用层次遍历的方法,设置宽度变量width记录宽度,max记录最大宽度,设置变量last指向当前层的最右结点,每次层次遍历出队时宽度+1 ,再与last指针比较,若两者相等(即遍历到最右结点),则width与max比较,用max记录下当前最大宽度,并将宽度清零,last指向下一层的最右结点。
- 算法:
int BTWidth(BiTree b) {
BiTree p;
int last = 0, width = 0, max = 0;
BiTree queue[MaxSize];
int front = -1, rear = -1;
queue[++rear] = b; //根结点入队
while(front < rear) {
p = queue[++front]; //出队
width++; //宽度+1
if(p->lchild) {
queue[++rear] = p->lchild;
}
if(p->rchild) {
queue[++rear] = p->rchild;
}
if(front == last) { //遍历到最右结点
if(width > max) {
max = width; //记录最大宽度
width = 0; //宽度清零
}
last = rear; //指向下一层的最右结点
}
}
return max;
}
后序遍历的应用
输出结点x的所有祖先(即路径)
- 设计思想:
采用后序遍历算法,在出栈的同时判断是否为x,如果为x输出栈内所有元素。 - 算法:
void Search(BiTree bt, ElemType x) {
BiTNode *p = bt, *r = NULL;
InitStack(S);
while(p || !IsEmpty(S)) {
if(p) { //走到最左边
push(S, p);
p = p->lchild;
}else {
getTop(S, p);
if(p->rchild && p->rchild!=r) { //如果右结点存在且最近未被访问过
p = p->rchild;
}else {
pop(S, p);
if(p->data == x) {
print(p);
while(!IsEmpty(S)) {
pop(S, p);
print(p);
}
}
r = p;
p = NULL;
}
}
}
}
最近公共祖先结点
- 设计思想:
后序非递归,当访问到p时,将栈中所有元素复制到临时栈T,再继续访问,访问到q时,从栈顶开始比较栈S和栈T中元素,第一个相等的元素即为最近公共祖先。 - 算法:
bool Ancestor(BiTree ROOT, BiTNode *p, BiTNode *q, BiTNode *&r) {
BiTree S[];
int Stop = -1;
BiTree T[];
int Ttop = -1;
BiTNode *x = ROOT, *visit = NULL;
while(x || Stop > -1) { //IsEmpty(S)
if(x) { //走到最左边
S[++Stop] = x; //push(S, x);
x = x->LLINK;
}else {
x = S[Stop]; //GetTop(S, x);
if(x->RLINK && x->RLINK != visit) {
x = x->RLINK;
}else {
x = S[Stop--]; //pop(S, x);
if(x == p) {
//将栈S中的所有元素复制到临时栈T
for(int i=0; i<=Stop; i++) {
T[i] = S[i];
Ttop = Stop;
}
}
if(x == q) {
//将栈S中的所有元素从栈顶开始,分别于栈T中比较,第一个相等的元素就是最近公共祖先
for(int i=Stop; i>-1; i--) {
for(int j=Ttop; j>-1; j--) {
if(S[i] == T[j]) { //相等
r = S[i]; //返回最近公共祖先
return true; //找到了
}
}
}
}
r = x;
x = NULL;
}
}
}
return false;
}
根据遍历序列建立树
- 设计思想:
- 根据先序序列确定树的根结点;
- 根据根结点在中序序列中划分出二叉树的左右子树包含哪些结点,然后根据左右子树结点在先序序列中的次序确定子树的根结点(即回到步骤1);
- 上述操作,直到每棵子树仅有一个结点(该子树的根结点)为止。
- 算法:
BiTree PreInCreat(ElemType A[], ElemType B[], int l1, int h1, int l2, int h2) {
//l1,h1为先序的第一和最后一个结点下标,l2,h2为中序的第一和最后一个结点的下标
//初始调用时,l1=l2=1, h1=h2=n
root = (BiTree)malloc(sizeof(BiTNode)); //建立根结点
root->data = A[l1]; //根结点
for(i=l2; B[i]!=root->data; i++); //根结点在中序序列中的划分
llen = i-12; //左子树长度
rlen = h2-i; //右子树长度
if(llen) { //建立左子树
root->lchild = PreInCreat(A, B, l1+1, l1+llen, l2, l2+llen-1);
}else {
root->lchild = NULL;
}
if(rlen) { //建立右子树
root->rchild = PreInCreat(A, B, h1-rlen+1, h1, h2-rlen+1, h2);
}else {
root->rchild = NULL;
}
return root;
}